CASOS DE ÉXITO
UNT
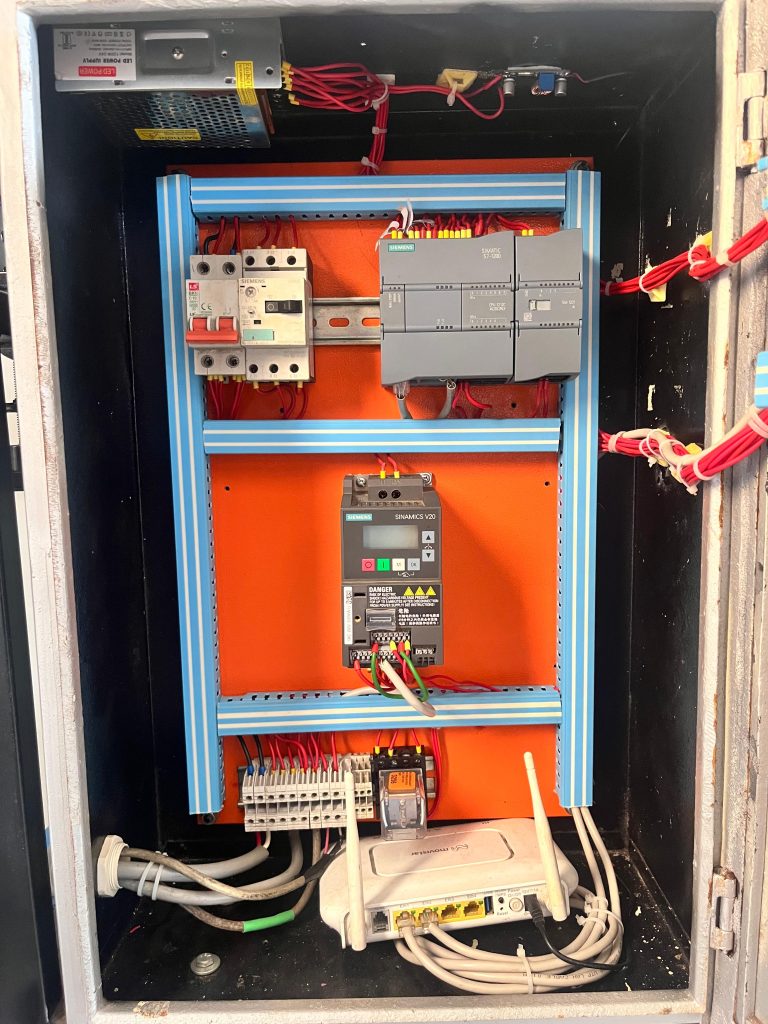
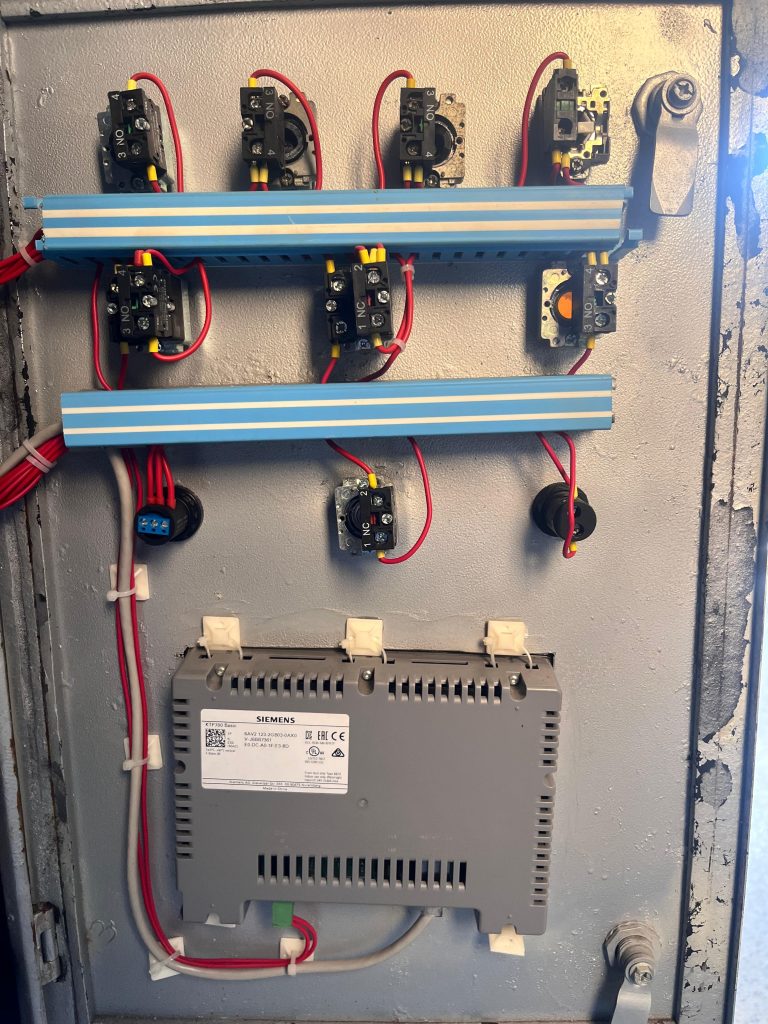
Sistema de Control de Nivel Ultrasonico – Industria 4.0
Sistema orientado a gestionar a través de la nube el control de nivel de líquidos en un tanque de manera eficiente y segura. A través del uso de un PLC Siemens 1212C, un variador de frecuencia Sinamics V20 y un sensor ultrasónico.
El sistema garantiza precisión en el control del nivel y ofrece flexibilidad de las operaciones, tanto automáticas como manuales para cualquier desempeño requerido en la industria sobre control de nivel de líquidos o sólidos.
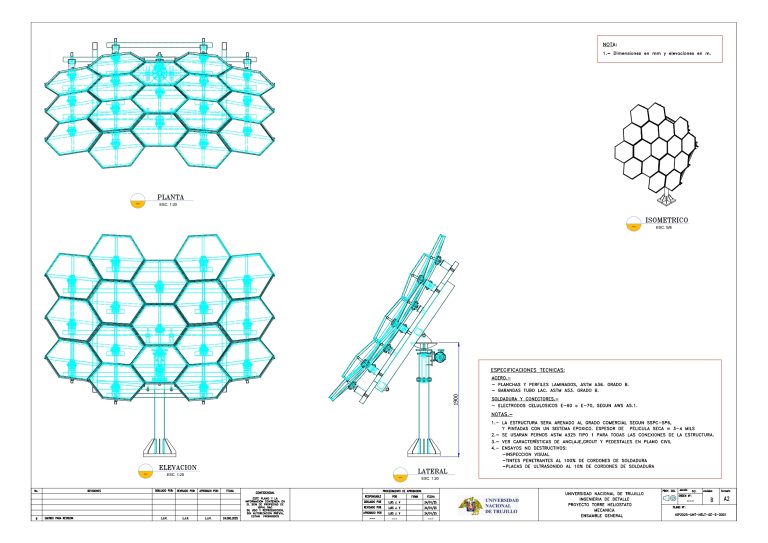
Diseño e Implementación de Prototipo de Generación de Vapor Solar a través de Concentrador de Torre Central y Heliostato de 3 m2
Un prototipo de generación de vapor solar a través de concentrador de torre central y heliostato de 3 m2, produciendo vapor a más de 100°C, capaz de realizar un rastreo solar autónomo de alta precisión en dos ejes para direccionar la radiación solar directa al receptor; y una arquitectura de control por “machine learning” para rastreo solar.
Aplicaciones:
Producción de energía eléctrica en plantas termosolares.
Procesos industriales que requieren vapor, como alimentos, textiles y minería.
Calefacción urbana y sistemas de agua caliente a gran escala.
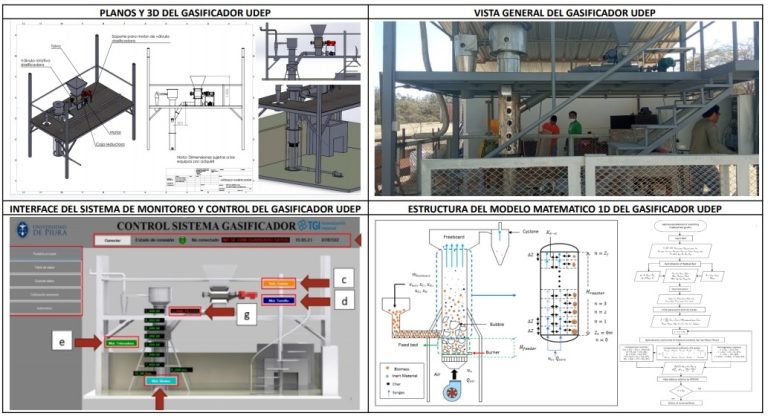
Hidrógeno Verde: Mejora Tecnológica de un Gasificador de Lecho Fluidizado para la Producción de Syngas con Alto Contenido de Hidrógeno:
Se mejorará tecnologías existentes como un gasificador de lecho fluidizado burbujeante que incorpore un suministro controlado de vapor de agua para aumentar el contenido de hidrógeno en el gas de síntesis (syngas), se realizarán modificaciones en el gasificador existente, que incluyen la implementación de un sistema de encendido dual, ajustes en el sistema de dosificación de biomasa y la instalación de un sistema de alimentación de vapor de agua que comprende un generador de vapor y un dosificador. Se espera obtener un sistema de gasificación que genere syngas con un porcentaje de hidrógeno de al menos 40%.
Aplicaciones:
Combustible limpio para transporte (vehículos, barcos o aviones).
Materia prima para industrias químicas y fertilizantes.
Almacenamiento de energía renovable en redes eléctricas.
Desarrollo de metodología para el diseño térmico de termas solares de tubos al vacío de alta eficiencia bajo restricciones latitudinales y climáticas del Perú
Se desarrolla una metodología para diseñar termas de tubos al vacío adaptadas al clima y latitud del Perú, optimizando su rendimiento en aplicaciones domésticas e industriales. Para ello se desarrolló un modelo matemático que describe las prestaciones térmicas (energéticas y exergéticas) para luego algoritmizarlo en software y cuya validación se realizó a través de la construcción y pruebas de desempeño térmico de 2 prototipos idénticos de termas solares de tubos al vacío diseñados para monitorear su desempeño en Trujillo y Piura.
Aplicaciones:
Agua caliente para hogares, hoteles y hospitales.
Calefacción de piscinas y sistemas de climatización.
Procesos industriales que requieren agua temperada, como lavanderías
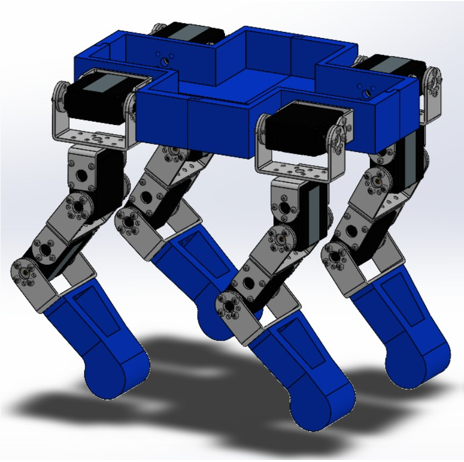
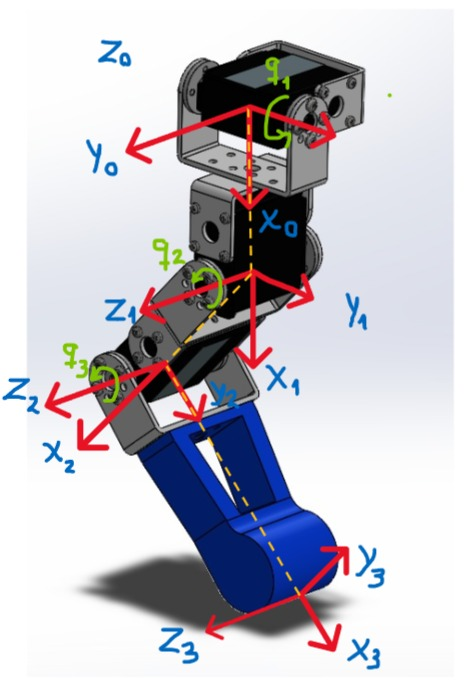
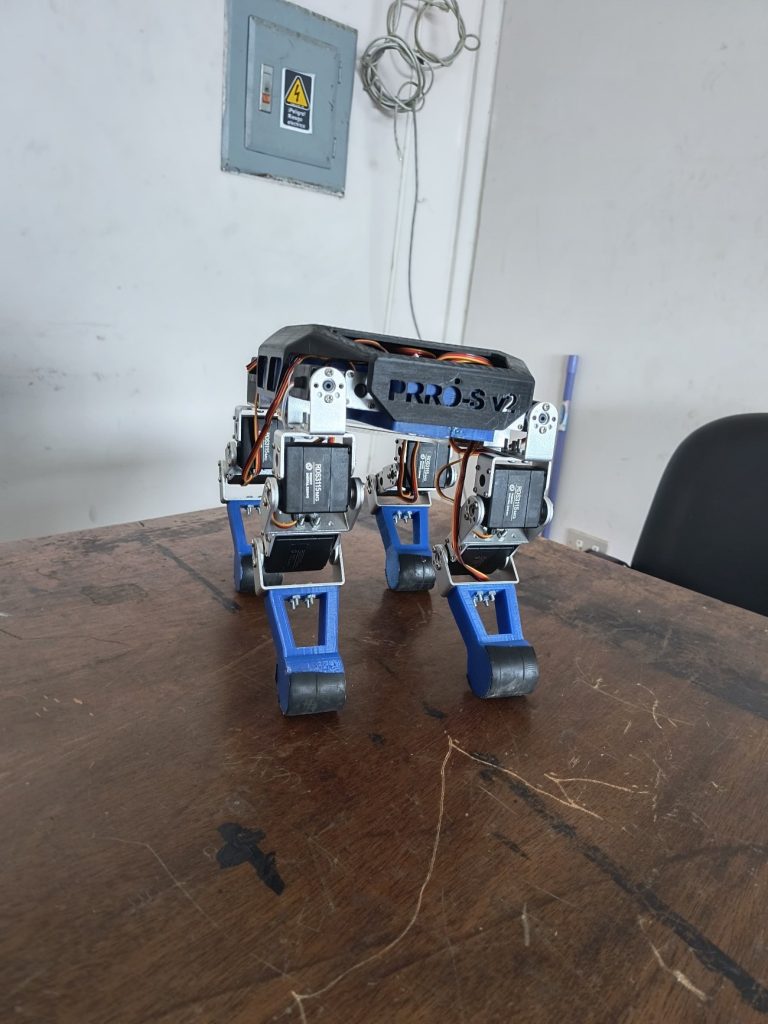
ROBOT CUADRÚPEDO PARA EXPLORACIÓN DE DESASTRES NATURALES.
Robot cuadrúpedo desarrollado con metodología de diseño mecatrónico VDI 2206, adaptada para sistema robóticos, incluido el uso de softwares especializados en Diseño CAD, Inventor, de diseño eléctrico y electrónico, para el modelamiento de planificación de trayectorias, Matlab y software de simulación de robots (CoppeliaSim).
Está diseñado para aplicaciones en exploración y rescate en zonas de desastre.
ROBOT OCTAPODO BUGS X
El Bugs-X fue diseñado con patentes articuladas que le permiten moverse con facilidad sobre terrenos irregulares y escombros. Equipado con una cámara Wi-Fi y IA que detecta si una persona está frente a la cámara, además de un sistema de perifoneo, alarma y linterna LED, el robot aumentó la capacidad de los rescatistas para localizar víctimas.
Este robot también destaca por su potencial en terrenos de barro gracias a su forma tipo artrópodo, permitiéndole moverse en superficies difíciles. Al ser escalado, el Bugs-X tiene aplicaciones potenciales en minería y agricultura, donde se requiere movilidad en terrenos complicados.
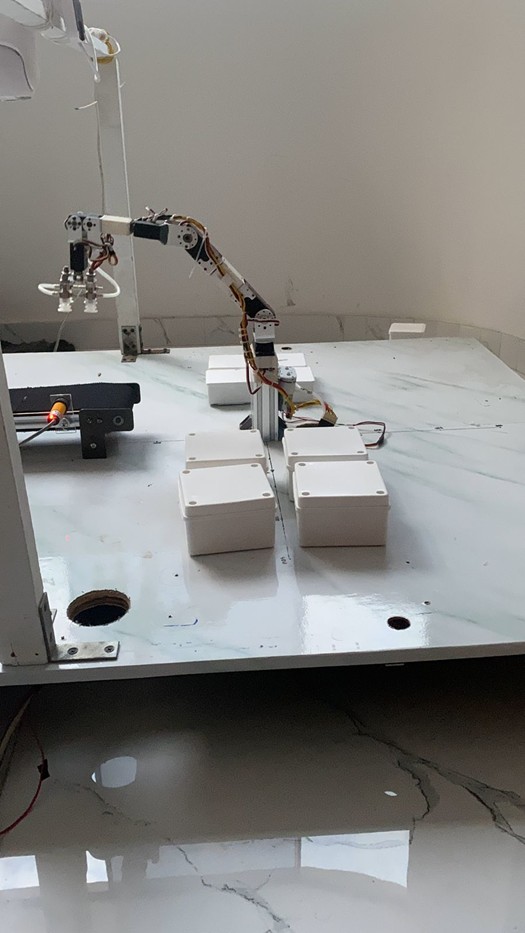
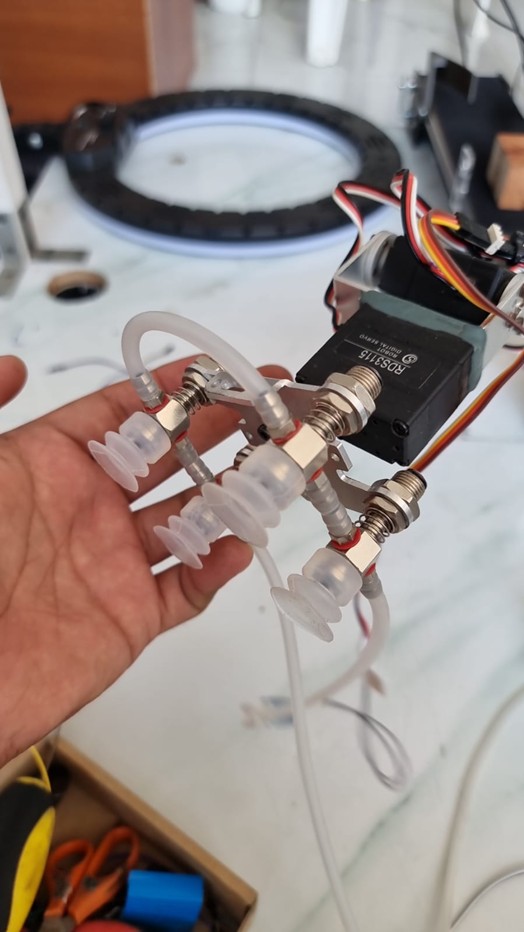
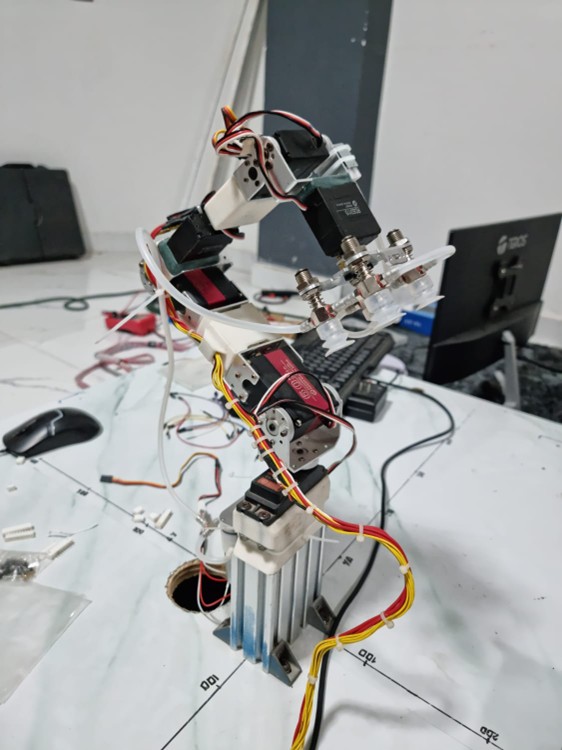
ROBOT MANIPULADOR DE 6GDL CON VISIÓN ARTIFICIAL PARA PALETIZADO AUTOMATIZADO EN ENTORNOS AGROINDUSTRIALES
El robot manipulador de 6 grados de libertad asistido por visión artificial se ha diseñado para mejorar la productividad, reducir errores, daños, y adaptar la manipulación de la diversidad de empaques y paletizado en las líneas de producción de productos agrícolas para exportación. Actualmente, muchas agroindustrias dependen de procesos manuales o semiautomatizados para el paletizado, lo que limita la velocidad, incrementa costos laborales y riesgos de daño en la carga.
Se usa la metodología de diseño mecatrónico VDI 2206 , abarcando el desarrollo de cinemática directa e inversa mediante el algoritmo Denavit-Hartenberg, y planificación de trayectorias con interpolación trapezoidal para movimientos Punto a Punto (PTP), Lineales (LINE) y Circulares (CIRC); se integró un sistema de visión artificial mediante técnicas de procesamiento de imágenes como definición de ROI, filtrado, umbralización y análisis de áreas; todo el desarrollo incluyó diseño CAD en SolidWorks, simulación en CoppeliaSim como entorno de validación, y la implementación de una interfaz gráfica en PyQt5 para control y programación del robot.
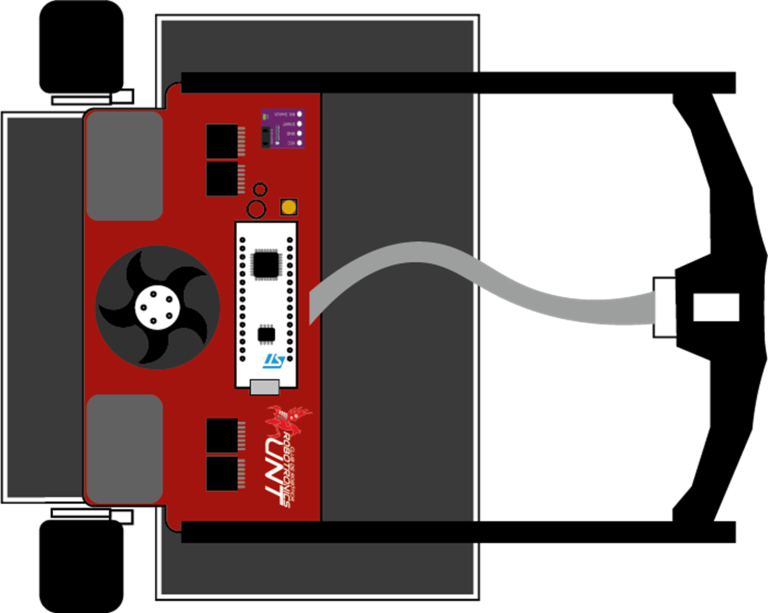
DRAGONFLY: ROBOT SEGUIDOR DE LÍNEA PARA COMPETENCIAS DE ALTO NIVEL
Dragonfly es un robot móvil autónomo de tipo diferencial, una plataforma avanzada, donde, combina modelamiento cinemático, teoría de control, filtrado de señales, control inteligente, diseño electrónico y fabricación personalizada, representando una solución de alto nivel para robótica móvil competitiva.
El sistema sensorial se basa en una barra de 16 sensores, el núcleo del procesamiento está compuesto por un microcontrolador con arquitectura ARM Cortex-M4, el sistema de control combina teoría de control clásico (PD) con control difuso (fuzzy), para su movimiento, utiliza motores DC controlados por drivers de alta potencia, además, incorpora una turbina de succión tipo EDF (Electric Ducted Fan) que genera una fuerza descendente, todo el sistema está integrado en una placa electrónica (PCB) de diseño propio y el cuerpo del robot ha sido diseñado mecánicamente para lograr una estructura ligera, compacta y estable
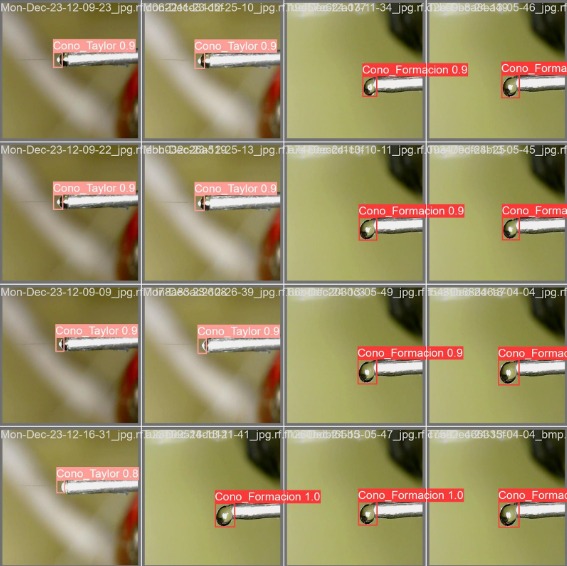
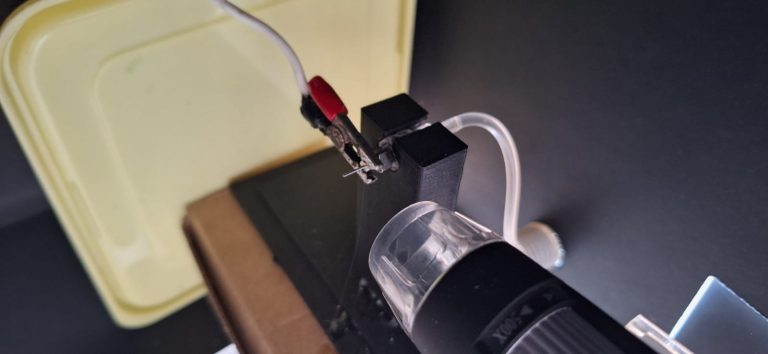
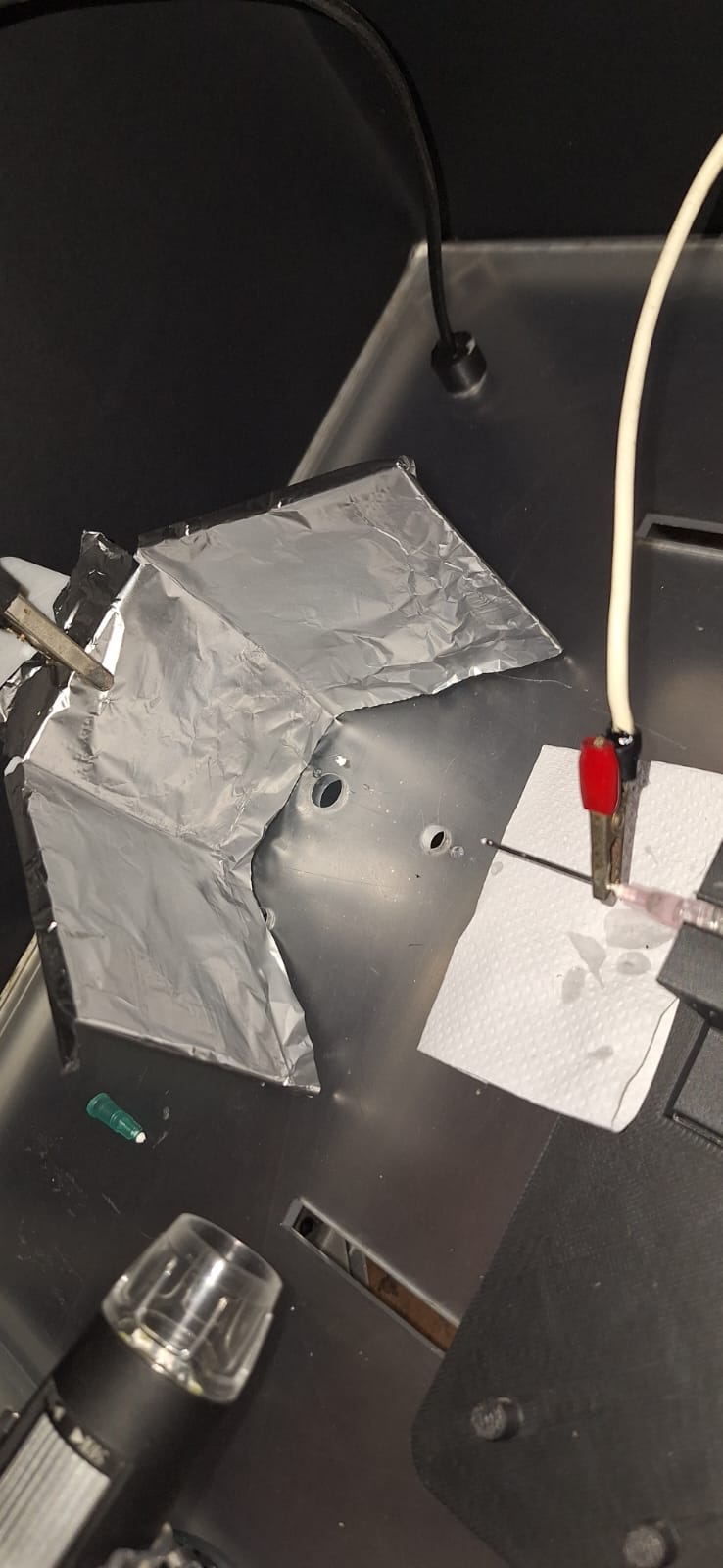
VISIÓN POR COMPUTADORA PARA LA PRODUCCIÓN DE NANOFIBRAS
Este proyecto plantea el desarrollo de un sistema de visión por computador para la identificación y cuantificación del cono de Taylor en el proceso de electrohilado, una técnica clave en la producción de nanofibras con aplicaciones en salud, medio ambiente e industria textil. La adecuada formación del cono de Taylor es determinante para la calidad del producto final; sin embargo, su observación directa implica riesgos para el operador, debido al uso de equipos de alto voltaje, y requiere un alto nivel de experiencia técnica. A nivel regional, representa un hito en la aplicación de inteligencia artificial en nanotecnología, un campo aún poco explorado en el norte del Perú. Su potencial de integración en laboratorios de investigación y futuras líneas de producción industrial lo posiciona como una propuesta de alto impacto económico, tecnológico y social.
El sistema propuesto emplea la red neuronal YOLO versión 10 para detectar automáticamente la formación del cono y estimar su geometría (altura, radio y ángulos). El modelo alcanzó un 98.7% de exactitud, con un recall y precisión de 100% para la detección del cono de Taylor y su formación, lo que demuestra su alta efectividad.